Exception Processing
Exception processing is the act of responding to an exception, and then
returning, if
possible, to the pre-exception execution state.
All Nios II exceptions are precise. Precise exceptions enable the system
software to
re-execute the instruction, if desired, after handling the exception.
Terminology
Altera Nios II documentation uses the following terminology to discuss exception
processing:
■ Exception—a transfer of control away from a program’s normal flow of
execution,
caused by an event, either internal or external to the processor, which requires
immediate attention.
■ Interrupt—an exception caused by an explicit request signal from an external
device; also: hardware interrupt.
■ Interrupt controller—hardware that interfaces the processor to interrupt
request
signals from external devices.
■ Internal interrupt controller—the nonvectored interrupt controller that is
integral
to the Nios II processor. The internal interrupt controller is available in all
revisions of the Nios II processor.
■ Vectored interrupt controller (VIC)—an Altera-provided external interrupt
controller.
■ Exception (interrupt) latency—The time elapsed between the event that causes
the
exception (assertion of an interrupt request) and the execution of the first
instruction at the handler address.
■ Exception (interrupt) response time—The time elapsed between the event that
causes the exception (assertion of an interrupt request) and the execution of
nonoverhead exception code, that is, specific to the exception type (device).
■ Global interrupts—All maskable exceptions on the Nios II processor, including
internal interrupts and maskable external interrupts, but not including
nonmaskable interrupts.
■ Worst-case latency—The value of the exception (interrupt) latency, assuming
the
maximum disabled time or maximum masked time, and assuming that the
exception (interrupt) occurs at the beginning of the masked/disabled time.
■ Maximum disabled time—The maximum amount of continuous time that the
system spends with maskable interrupts disabled.
■ Maximum masked time—The maximum amount of continuous time that the
system spends with a single interrupt masked.
■ Shadow register set—a complete alternate set of Nios II general-purpose
registers,
which can be used to maintain a separate runtime context for an ISR.
Exception Overview
Each of the Nios II exceptions falls into one of the following categories:
■ Reset exception—Occurs when the Nios II processor is reset. Control is
transferred
to the reset address you specify in the Nios II processor IP core setup
parameters.
■ Break exception—Occurs when the JTAG debug module requests control. Control
is transferred to the break address you specify in the Nios II processor IP core
setup parameters.
■ Interrupt exception—Occurs when a peripheral device signals a condition
requiring service
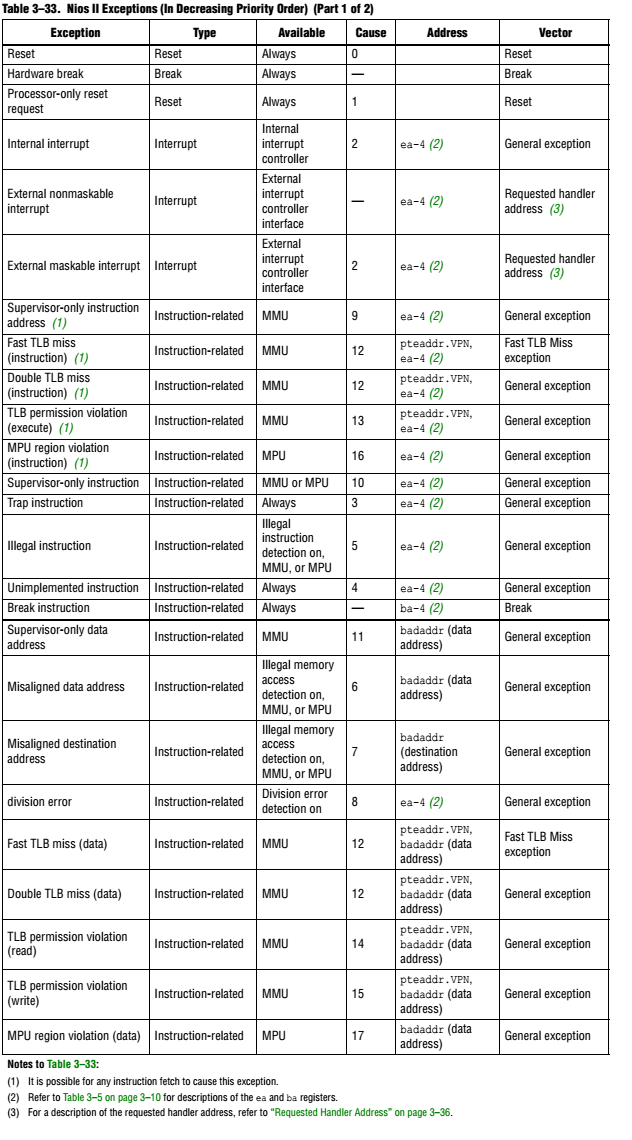
■ Instruction-related exception—Occurs when any of several internal conditions
occurs, as detailed in Table 3–33 on page 3–32. Control is transferred to the
exception address you specify in the Nios II processor IP core setup parameters.
Table 3–33 lists all possible Nios II exceptions in order of highest to lowest
priority.
The following table columns specify information for the exceptions:
■ Exception—Gives the name of the exception.
■ Type—Specifies the exception type.
■ Available—Specifies when support for that exception is present.
■ Cause—Specifies the value of the CAUSE field of the exception register, for
exceptions that write the exception.CAUSE field.
■ Address—Specifies the instruction or data address associated with the
exception.
■ Vector—Specifies which exception vector address the processor passes control
to
when the exception occurs.